
[CNMO科技音讯]3月17日,守望汽车发布下一代自动驾驶基础模子MindVLA-o1。据CNMO了解,MindVLA-o1通过五大期间翻新,让自动驾驶看得更远、想得更深、行得更稳、进化更快、部署更高效。

守望汽车基座模子负责东说念主詹锟暗示:“当咱们把视觉、言语和行径长入到一个模子中时,它已不再仅仅自动驾驶模子,而是在安谧演化为面向物理寰球的通用智能体。基于吞并套VLA模子,不仅不错戒指车辆,也偶然推广到机器东说念主。因此,自动驾驶仅仅物理AI的起始,畴前这类基础模子将开动新的具身智能范式”。
据CNMO了解,麻将胡了游戏下载2025年,守望汽车将空间交融、言语交融与行径有打算长入到吞并模子框架,构建了基于VLA、寰球模子与强化学习三大期间栈的VLA司机大模子,并于8月随守望i8托付负责推送,9月向ADMax用户全量推送。截止2025年底,VLA司机大模子月使用率达到80%,VLA请示累计使用1225.4万次;春节期间守望援助驾驶总里程达2.5亿公里,VLA请示使用次数达130.3万次。
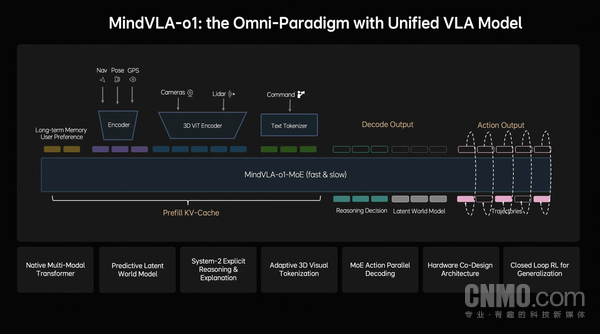
守望汽车MindVLA-o1以原生多模态MoETransformer为中枢PG电子(PocketGames)游戏官网,通过五大期间翻新——3D空间交融、多模态想考、长入转为生成、闭环强化学习(Closed-loopRL)和软硬件协同设想(Hardware–SoftwareCo-Design),构建了面向物理寰球智能的自动驾驶基础模子。
 备案号:
备案号: